视觉里程计 视觉里程计是VSLAM中的前端部分,而特征追踪是视觉里程计中的一个基础和关键的任务,它的作用是从两张或者多张图片中识别对应相同或相似的内容。通过追踪图像中局部特征在前后帧图像中的位置,可以实现视觉运动估计这个工作。 但是需要提及的是特征的抽取及匹配是整个VSLAM系统中最耗时的计算过程之一,所以如何实现快速且鲁棒的特征点检测匹配算法也是研究VSLAM一个重要的话题。 局部特征
前言 在上一个Part,我们知道了坐标转换的一些基础只是,其实三维空间的刚体运动与其也有紧密的联系,可以理解为刚体运动为持续的把运动坐标系中的坐标变换到固定坐标系中,此外再加上旋转这一过程。 世界坐标系与里程计坐标系 世界坐标系:世界坐标系(world坐标系)一般指固定坐标系,在系统运行过程其全局坐标不发生改变。在建图时,经常会认为起点为世界坐标系原点,而本体初始旋转角度为0。里程计坐标
前言 在 相机投影及相机畸变一文 中,已经和大家介绍了三维世界到二维世界的图像投影和图像畸变及其去除相关问题。有了内参,我们可以一定程度的还原相机到底看到了什么。但是相机观测的数据还是处于相机坐标,我们还需要将局部观测转变到全局观测上来。将传感器坐标系观测转换到载体坐标系需要通过外参。本章将介绍坐标系转换及相机外参这两部分内容。 坐标系变换 坐标系变换其实在解决同一个物体在不同坐标系观察下的
SLAMSLAM(Simultaneous Localization and Mapping),意为同时定位与建图。看名字比较难理解,但是结合到日常生活中的例子就很好懂了。想象一下到了一个陌生环境中,比如你现在的某个陌生的迷宫里面,你需要找到出去的路,一开始你不知道自己在哪所以只能凭感觉四处走动,但是在行走过程中你还是很聪明的做了一些标记,当突然走到一个位置,你发现目前这个场景好熟悉,是不是哪里见
作者ID: 流继承 Ⅰ. 数字图像的表示 0x00 位数 计算机采用0/1编码的系统,数字图像也是利用0/1来记录信息。我们平常接触的图像都是8位数图像,包含0~255灰度。 0:代表最黑 1:表示最白 0x01 二值图像 一幅二值图像的二维矩阵仅由0、1两个值构成; “0”代表黑色,“1”代白色。由于每一像素(矩阵中每一元素)。 其取值仅有 0 和 1 两种可能
时间与运动 3.1 轨迹 轨迹是具有特定时间属性的一条路径。 3.1.1 平滑一维轨迹 一个真正的机器人关节都有一个额定的最大速度,而且为了使关节运动时间最短,应使其运行在最大速度上的时间尽可能长。因此我们希望速度曲线的顶部是一条直线。 混合曲线轨迹:延长最大速度运行时间,使得速度曲线顶部为一平直线,两侧为加减速段。 3.1.2 多维的情况 大多数实用的机器人都有一个以上的运动轴或自
4.1移动机器人小车 四轮车常用的模型是图4.2所示的双轮自行车模型。其后轮固定在车体上,前轮可以绕 水平轴转动以实现车辆转向丸 该车的速度依据定义为其在x方向上的速度v,而在y方向上的速度是零,因为车轮不能侧移。在小车坐标系{V}中表示为: Vx=V,Vy=0 其角速度为:w=V/R1 机器人小车在世界坐标系中的速度是(v cos 0, v sin 0),结合方程(4. 1),可以
Ⅰ. 形态学操作 0x00 腐蚀和膨胀 腐蚀和膨胀是最基本的形态学操作,腐蚀和膨胀都是针对白色部分(高亮部分)而言的。 膨胀就是使图像中的高亮部分扩张,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮区域被蚕食,效果图拥有比原图更小的高亮区域。膨胀是求局部最大值的操作,腐蚀是求局部最小值的操作。 腐蚀 操作: 用一个结构元素扫描图像中的每一个像素,用结构元素中的每一个像素与覆盖的像素
机器视觉与控制——轨迹(上) 前言 轨迹是具有特定时间属性的一条路劲,其中一个重要特征是要平滑(位置和姿态随时间流畅地变化),文章分俩篇将从一维扩展到多维,最后讨论如何生成分段性轨迹,使得机器人不间断地经过一系列中间点。 一维轨迹 时间地标量函数是光滑的,它的低阶时间导数是连续的。一般速度和加速度都是必须连续的,有时候其导数也需要连续。 这种函数的一个常见代表是时间多项
openCV图像矩阵Mat和二维数组的互相转换 在openCV的应用中,我们获取图像的矩阵信息很简单。但是我们可能想调用其他的矩阵运算库(比如Eigen库)来进行计算。那么我们就需要把openCV读取到的类型(比如Mat类型)的矩阵信息传递到另外类型(比如Eigen库的MatrixXd类型)的矩阵。这该怎么办呢?由于目前在网络上搜不到特别符合楼主意愿的答案,故写此博客,希望能够帮助到同楼主一样徜
省流建议 本文针对以下需求: 想自动化标注一些目标 不再想使用yolo 想在目标检测/语意分割有所建树 计算机视觉项目 想玩一玩大模型 了解自动化工具 了解最前沿模型 自定义目标P图替换 … 确定好需求,那么我们发车! 实现功能与结果 1.该模型将首先使用对语言的理解来识别文本提示中提到的对象。例如,在描述“两只用棍子的狗”中,该模型将“狗”和“棍子”一词识别为对
原文: http://blog.csdn.net/isuccess88/article/details/73546835 在Ubuntu中用anaconda快速安装opencv3 我的系统环境: Ubuntu16.04, Anaconda3(python 3.6) 题外话:在追求人工智能的不断前进的道路上, 安装很多库让我非常”蛋疼”, 又尤其是安装caffe和opencv中各种坑都有……
邮箱:1309399183@qq.com 数据处理 图像二分类涉及到数据的处理,需要将图像转换为计算机可以识别的数字格式。通常使用的方法是将每个图像转换为一个多维数组,每个像素点的值代表该像素点的颜色强度。对于彩色图像,通常有三个通道(红色、绿色、蓝色),因此对于每个像素点,需要有三个值来表示它的颜色。\ from torchvision import transforms # 定
Opencv3从头开始(十)Harris角点检测如果某一点在任意方向的一个微小变动都会引起灰度很大的变化,那么我们就把它称之为角点 cornerHarris 函数用于在OpenCV中运行Harris角点检测算子处理图像 /* Harris角点检测 */ #include<opencv2/opencv.hpp> #include<opencv2/imgproc.hp
今天讲一下图像入门学习教程————-图像分类。图像分类是目标检测任务的基础,学会以下操作,打下良好基础! 数据布置 以三分类为例,数据布置放置示例,也就是dataset下有两个文件夹:val和train。train和val文件夹下分别是三个文件夹class1/2/3,记住相同类别的图像放在一个文件夹!!!,多类别一样道理布置!!! dataset/ train/
Opencv3从头开始(五)形态学操作之膨胀、腐蚀、开闭运算 腐蚀和膨胀是对高亮部分而言,对黑白图像效果更好一些,所以我们第一步让仓老师变成黑白的。图像二值化 //二值化 cvtColor(image,image_gray,COLOR_BGR2GRAY); threshold(image_gray,image_thre,125,255,THRESH_BINARY);
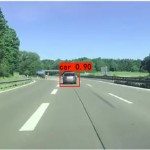
这段代码是一个使用YOLO模型进行目标检测的Python脚本。下面我将逐步解释脚本的主要部分,并提供一些关于超参数的使用方法。 1.脚本结构 导入相关库 设置配置参数 加载YOLO模型 运行目标检测 处理检测结果 显示或保存结果 2.超参数说明 —weights: 指定YOLO模型的权重文件路径。 —source: 指定输入数据源,可以是图像文件、视频文件、摄像头设
Opencv3从头开始(三)图像滤波基础-方框、平滑、高斯滤波滤波部分 /* ------------------------ 滤波相关,用于降噪、模糊 方框滤波、平滑滤波、高斯滤波 ------------------------ */ #include<opencv2/opencv.hpp> #include<opencv2/imgproc.hpp&g
Opencv3从头开始(二)图像线性混合看效果哦,给仓老师加点雪…主要用到addWeighted函数在进行线性融合时,记得要resize统一尺寸。 #include<opencv2/opencv.hpp> #include<opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp> usi
OPENCV调用cvCreateFileCapture返回NULL 最近在c++使用视频处理项目,当capture = CvInvoke.cvCreateFileCapture(file)获取视频信息的时候,总返回空值NULL 相信大家也遇到过同样的问题,几番周折,我查找了一些资料,造成这种错误的原因有以下几点:1.你看看自己工程里面是否添加了opencv_ffmpeg*.dll文件( *代表
第三方账号登入
看不清?点击更换
















第三方账号登入
QQ 微博 微信