











2336人查看
0条评论




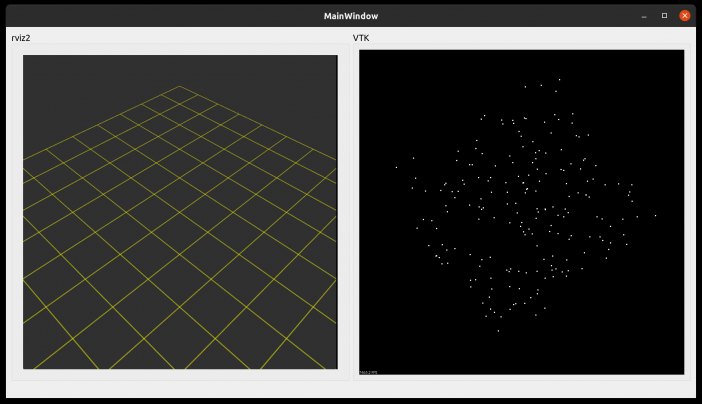
基于 QT5 的 ROS2 GUI 开发教程

16届智能车竞赛创意组
OriginBot开发之旅
PID与电机

STM32基础学习
Tensorlfow增加或者减小矩阵的维度的两个方法
10 小时前6轴并联机器人开发--有限元分析
10 小时前基于pointpillars的点云目标检测、测试评估、TensorRT后量化及ROS可视化
13 小时前路径规划算法之刚体变换
14 小时前python学习——正则表达式
14 小时前单线激光雷达(SICK)驱动安装及时空标定
14 小时前空洞卷积的利弊与对DCNN感受野的影响
1 天前从零入门激光SLAM(十三)——LeGo-LOAM源码超详细解析4
1 天前【文献解析】3D高斯最全综述
1 天前语义分割算法——应用空洞卷积和CRF的DeepLabv1
1 天前精选【EHub_tx1_tx2_E100】Ubuntu18.04 + ROS_ Melodic + Intel realsense D435深度相机(如何在该环境下打开摄像机获取rgb/深度图/点云)
2 天前字符串操作常用的函数总结
2 天前【数值优化之线搜索方法】
2 天前LIO-SAM定位+Move_base导航+实车调试
2 天前整形数字转字符的方法
2 天前JSON数据的理解
2 天前【proteus仿真项目实例】51单片机设计电子秤proteus仿真
2 天前精选关于举办第一届“地平线杯”深圳大学智能机器人大赛的通知
2 天前【文献解析】3D Gaussian Splatting for Real-Time Radiance Field Rendering
2 天前【proteus仿真项目实例】51单片机-485-PC串口通信
2 天前










第三方账号登入
QQ 微博 微信