

注意注意:本次活动报名时间为2024年3月15日-6月15日,请各位同学留意报名时间,谨防误报错报!!
报名链接:第十九届全国大学生智能车竞赛地平线创意组智慧医疗挑战赛 报名入口
01 报名通知
1.1 竞赛介绍
全国大学生智能汽车竞赛是一项以“立足培养、重在参与、鼓励探索、追求卓越”为指导思想,面向全国大学生开展的具有探索性的工程实践活动。截至目前,全国大学生智能汽车竞赛已成功举办十八届,覆盖全国数百所高校,参赛学生总规模超55万人次,学生收获和竞赛声誉均保持高位。
本次地平线创意组智慧医疗挑战赛旨在通过智能机器人在智慧医疗场景下的应用推动人工智能等相关专业“以赛促教”、“以赛促学”。竞赛主要涉及的知识点包括:移动车模的运动控制设计、AI视觉的应用开发设计、数字孪生应用以及遥操作在数字环境与物理环境下的融合。
第十九届全国大学生智能汽车竞赛-地平线创意组智慧医疗挑战赛分为线下全国选拔赛(包括省赛和赛区赛)和全国总决赛两个阶段,参赛选手需使用OriginCar智能机器人套件参加比赛。

OriginCar智能机器人外观
1.2 报名方式
本次报名需通过地平线开发者社区-活动中心-智能车竞赛专区-点击报名(https://developer.horizon.cc/activity/id=204825652464181762),报名时间:2023/03/15-2023/06/15。

同时,古月居社区竞赛频道(https://www.guyuehome.com/)同步提供报名须知及报名跳转链接。
报名申请表模板可在百度网盘下载,该申请表在指导老师签字及院系盖章后,需作为附件在报名链接内上传。链接:https://pan.baidu.com/s/1FH9txTJil7aMCIUOzhkVcg?pwd=gyh1 提取码:gyh1
1.3 参赛要求
1、本赛项面向全国全日制在校本科生和职业院校学生。
2、本赛项为团体赛形式,每支参赛队由不超过5名学生和不超过2名指导教师组成。学生必须是截止到2024年6月仍然在校的学生。
3、所有参赛队必须以学校为单位进行报名,不得跨校组队。本赛项不分组别,本科及职业院校在同一组别下竞赛。
注:山东、安徽、浙江省队伍参赛规则以省组委会公布为准。
4、全国选拔赛环节,每所学校报名数量不设限制,但为维持公平性,同一所学校获得全国选拔赛一等奖队伍最多2支,二等奖不设限制。同一所学校最多只有1支队伍能晋级全国总决赛。全国选拔赛一等奖20%,二等奖35%,完成竞赛可授予三等奖,补赛完成可授予优秀奖,未完成竞赛没有奖。
注:山东省不限制每所高校的报名数量,获奖比例以省组委会通知为准;浙江省、安徽省每所高校的报名数量、获奖比例以省组委会通知为准。
5、每位学生可同时参加竞速组别和创意组别的比赛,但不能同时参加两个不同组别的创意赛。
参赛选手报名须保证所提供的个人信息真实、准确、有效,否则取消选手参赛资格。
1.4 技术支持
1、比赛流程、技术问题等请加入地平线创意组官方QQ交流群(535373387)。
2、常见技术问题可在地平线开发者社区(https://developer.horizon.cc )、古月居社区(https://www.guyuehome.com)智能车竞赛专栏中查看。
1.5 培训支持
本次竞赛提供5场免费在线直播培训。直播时间会提前地平线开发者公众号、古月居公众号、地平线开发者社区(https://developer.horizon.cc )、古月居社区(https://www.guyuehome.com)智能车竞赛专栏等公布。
在线直播培训平台包括:古月学院、古月居视频号、B站等。
1.6 资料获取
本次赛事相关培训资料可在地平线开发者社区、古月居持续更新,参赛选手可获取相关课程资源。
同时,OriginCar智能机器人相关资料,也可在百度网盘进行下载。 链接:https://pan.baidu.com/s/1FH9txTJil7aMCIUOzhkVcg?pwd=gyh1 提取码:gyh1

1.7 其他
赛事后续通知及规则补充,请请关注TsinghuaJoking公众号(卓晴老师)、地平线开发者公众号、古月居公众号、地平线开发者社区(https://developer.horizon.cc )智能车竞赛专栏、古月居社区(https://www.guyuehome.com)智能车竞赛专栏等。
报名咨询:
联系人:周老师 邮箱:mingzhou@ps-micro.com
02 赛项简介
2.1 赛事背景
随着人工智能、数字孪生、智能机器人等相关技术的快速发展,多种技术的结合已经成为未来社会发展的必然趋势。人工智能是计算机软硬件系统模拟人类智慧,从而实现对数据的自主分析和决策;数字孪生是物理世界的数字副本,从而能够模拟出真实对象的运行状况;而智能机器人在人工智能、数字孪生的加持下,能够更好的实现人类发展和满足生产生活的需求。
地平线将本次竞赛的主题定义为“智慧医疗”,以地平线机器人开发套件RDK X3为主控制器,通过人工智能技术、数字孪生技术、遥操作等技术,在传统医院复杂工作场景下完成智能机器人卫生消杀和巡检的人机协同工作,赋能机器,让人类生活更安全、更美好。此外,地平线也希望通过本次竞赛推动人工智能、机器人、自动化、机械、汽车等相关专业的人才培养方案、课程体系、实验实训条件等方面的建设,为社会发展持续提供优秀人才。
2.2 赛事目的
本次竞赛旨在通过智能机器人在智慧医疗场景下的应用推动人工智能相关专业“以赛促教”、“以赛促学”。竞赛主要涉及的知识点包括:移动车模的运动控制设计、AI视觉的应用开发设计、数字孪生应用以及遥操作在数字环境与物理环境下的融合。
2.3 赛事准备
本次竞赛,参赛团队成员,需要掌握C++/Python、移动机器人、人工智能、ROS、嵌入式系统、自动控制、数字孪生、通信等相关技术知识,能利用Foxglove等软件对车模进行远程运动控制。相关前置课程知识可登录地平线开发者社区(https://developer.horizon.cc/)课程中心获取。
03 参赛要求及赛场安排
3.1 参赛要求
关于3.15号发布的竞赛报名通知,现补充增加研究生参赛通知,具体调整如下(参见红色字体):
1、本赛项面向全国全日制在校研究生、本科生和职业院校学生。
2、本赛项为团体赛形式,每支参赛队由不超过5名学生(其中最多1名研究生)和不超过2名指导教师组成。学生必须是截止到2024年6月仍然在校的学生。
3、所有参赛队必须以学校为单位进行报名,不得跨校组队。本赛项不分组别,本科及职业院校在同一组别下竞赛(山东、安徽、浙江省队伍参赛规则以省组委会公布为准)。
4、所有参赛队选手所提供的个人信息必须真实、准确、有效,否则取消参赛资格,参赛队伍报名成功后,不得调整和更换参赛队员。
3.2 参赛时间安排
参赛报名时间安排见后续通知。
04 竞赛方案
4.1 竞赛任务简介
本赛题设定的场景为智慧医疗,智能机器人在人机协同下完成卫生消杀和巡检的工作。根据任务要求,完成数字孪生在智能机器人的应用、智能机器人在物理环境和数字环境的数据实时同步、AI视觉、任务识别、障碍物检测、遥操作等。选手需根据比赛具体要求,开展智能机器人相关功能的调试、环境搭建、使其在指定场景中完成工作。
4.2 比赛要求
4.2.1 比赛场地
- 物理环境比赛场地
物理环境比赛场地的设计尺寸为5米*5米,分为A、B、C三个区域。除障碍物位置为随机设置外,其他设施均固定在地图指定区域位置。竞赛场景元素包括:地图、障碍物、和围栏板。相关元素将会后续在古月居官方网站上提供购买渠道,以及供打印的地图源文件。
各区域功能说明如下:
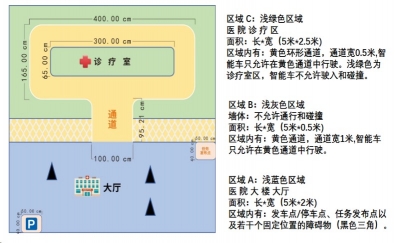
图1 比赛场功能示意图
竞赛图车模移动引导线:
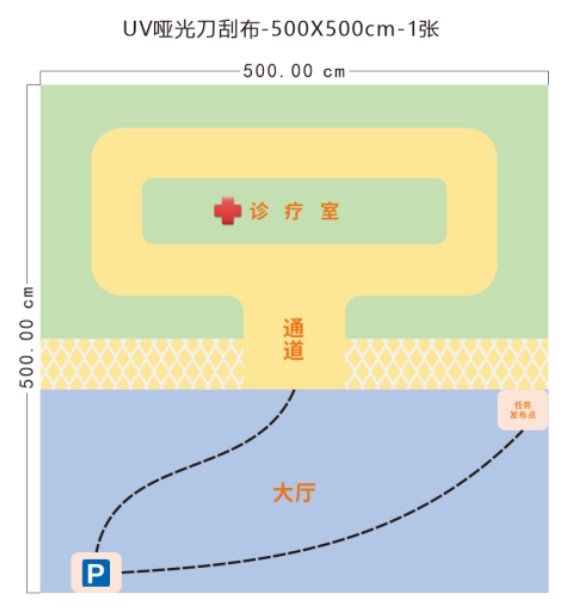
图2 地图引导线示意图
区域A(浅蓝色):医院大楼大厅,区域尺寸5米*2米。区域左下角为固定位置的发车点/停车点(P);区域右上角为固定位置的任务发布点,任务发布点处将放置任务识别元素;区域内若干个随机放置的障碍物(图中黑色三角形表示),用来模拟医院大厅内出现的障碍物;此外,区域内将会铺设单向引导线辅助在区域A行驶。
区域B(浅灰色):医院的通道区,区域尺寸5米*0.5米。区域中间位置有长度为0.5米、宽度为1米的通道,通道将区域A、B、C连接。
区域C(浅绿色):医院诊疗区,区域尺寸5米*2.5米。区域的浅绿色部分为医院的诊疗室,中间黄色部分为环形通道,通道的宽度为0.5米。
- 赛场环境
智能机器人比赛场地为无磁场干扰环境。地图由刀刮布绘制而成。考虑到竞赛场地环境可能存在表面不平整、边框上有裂缝、光照条件有变化等因素,各参赛队在设计智能机器人时,需要考虑各种环境下的应对措施。
- 障碍物
每次比赛中会在区域A设置3个障碍物,车模运行时需要避开障碍物,否则比赛时会有相应的加时处罚,障碍物会在A区的3个障碍区中随机摆放(地图上会设置障碍物区,各障碍区的间隔距离不小于100cm)。障碍物尺寸为:30cm×20cm×20cm。
4.2.2 比赛用车模
本次竞赛仅允许使用OriginCar智能机器人套件作为竞赛车模(以下简称:车模)。车模不允许被改装(车体结构、电机、车轮、扩展版、主控板、相机、电池模块等已有部件不得改装,车模所有部件禁止任何形式的拆卸)。参赛队可以根据自身的参赛策略,对车模进行通信等器件的加装。
- OriginCar智能机器人套件产品外观:

图3 OriginCar智能机器人套件外观
- 产品规格:
车模主要参数见下面表格:

表1 车模主要参数
- 主控处理器规格:
主控处理器详细说明:主控处理器为北京地平线信息技术有限公司研发出品的RDK X3开发板,具备5 TOP算力,板卡支持但不限于FOCS、YOLO、mobilenetv2等算法的运行及使用。

图4 主处理器 地平线RDK X3开发板
地平线RDK X3开发板主要参数见下面表格:

表2 主处理器 地平线RDK X3开发板
4.3 比赛任务
- 前置任务:比赛开始前,各参赛队需要在五分钟内完成竞赛的相关部署,包括:控制程序、平台软件,通信测试等。
- 赛题任务:围绕比赛主题——智慧医疗,在竞赛规定的180秒时间内,完成竞赛环节的各子任务,并以任务完成度以及任务完成的时间进行参赛队排名。
- 子任务1:前往任务发布点领取任务。物理环境中,车模从区域A的发车点(P)出发,前往区域A的任务发布点并获取指定任务,子任务1结束。
- 子任务2:完成诊疗区的消毒和巡检。遥操作模式操控车模。按任务发布点的规定路线完成巡航任务,返回大厅入口,子任务2结束。
- 子任务3:返回停车点结束任务。车模采用自主控制返回A区的停车点(P),子任务3结束。
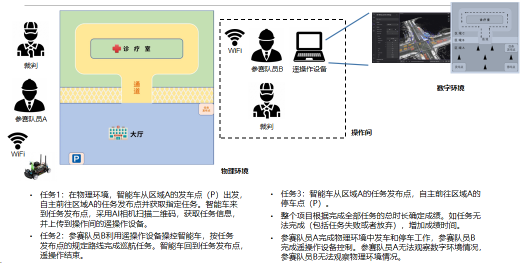
图5 竞赛各子任务及队员任务分配示意图
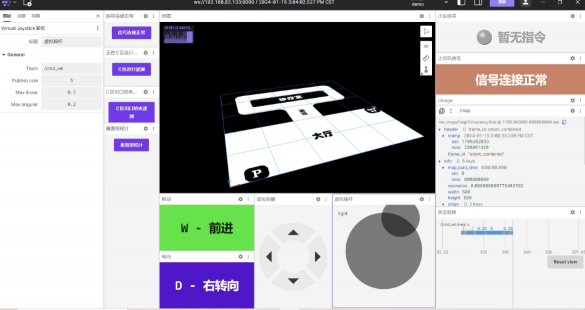
图6 数字孪生,遥操作控制示意图
4.3.1 规则详情
- 赛场发车流程
比赛过程中,参赛队按照裁判员指令依次上场。每场比赛仅允许一支参赛队的1台车模竞赛,同时只允许三名队员上场。上场后选手有5分钟时间进行准备。根据裁判员发出“倒计时3、2、1,发车”口令后,参赛队员手动起动车模。裁判员未发口令时,参赛队员不能擅自抢发车或误发车。出现误发车一次将被警告,计时器不计时,误发车两次将罚加20秒,此部分增加时间T1,行为特别严重者被警告或取消比赛资格。
- 赛场虚拟环境设备
赛场内会提前安装用来运行数字环境的计算机平台和用于展示的显示器,参赛队在发车指令前需要提前在提供的5分钟内准备计算机平台与车模的通讯连接、加载车模软件和计算机平台软件。
- 赛场队员任务分配
一个参赛队三名上场参赛队员中需要两名队员现场执行任务。参赛队员A完成物理环境中发车和停车工作,参赛队员B完成遥操作设备控制。参赛队员A无法观察数字环境情况,参赛队员B无法观察物理环境情况,若队员之间出现相互辅助则违规,将罚加20秒,此部分增加时间T2,行为特别严重者被警告或取消比赛资格。
- 赛题任务及得分规则
竞赛环节共包括3个子任务,要求在竞赛规定的180秒时间内完成各项子任务,并以任务完成度以及任务完成的时间进行参赛队排名。
子任务1:前往任务发布点领取任务
物理环境中,车模从区域A的发车点(P)出发,前往区域A的任务发布点并获取指定任务。除不得触碰本区域的障碍物外,车模可在本区域的任意位置行驶。数字环境中,车模需同步前往任务发布点。在物理环境中,车模识别到任务发布点处任务(任务为顺时针或逆时针在C区域行驶)并将任务名称(顺时针或逆时针)上传至数字环境,子任务1完成。
在物理环境中,如果车模触碰障碍物,每触碰1次,比赛用时增加10秒,最大惩罚增加时间为30秒,如错误获取任务信息,或未完成子任务1就直接进行子任务2,则一次性惩罚增加时间50秒。子任务1环节最大惩罚增加时间不超过50秒,此部分增加时间记为X1。另外,当计时180秒结束,比赛结束。
子任务2:完成诊疗区的巡航消毒
数字环境中,车模获得任务信息后,车模进入遥操作模式。在遥操作模式,参赛队员B在数字环境中,通过键盘操控数字环境的车模。物理环境中的车模按照参赛队员B的操作方式,完成巡航消毒任务。参赛队员B面向数字环境操作车模运动,不能观察物理环境。
物理环境中,车模通过区域B的通道,前往区域C进行巡航消毒,车模在区域B和区域C执行任务时只能在黄色范围的通道上行驶,需要按获取的任务要求,顺时针或者逆时针沿着黄色通道行驶一周,车模在物理环境离开区域B,并向车模发送自动状态指令,子任务2完成。
参赛队员B在数字环境中未按照任要求进行遥操作,则子任务2失败,子任务2失败或未完成子任务2就直接进入子任务3的,一次性惩罚增加时间50秒,此部分增加时间记为Y1。另外,当计时180秒结束,比赛结束。
子任务3:返回停车点结束任务
数字环境中,选手B发布自动状态后,车模进入自动状态,需从区域B出口,自主前往结束点,任务完成,子任务计时C。
在物理环境中,如果车模触碰障碍物,每触碰1次,比赛用时增加10秒,最大惩罚增加时间为50秒,此部分增加时间Z1。本环节,在物理环境车模如在比赛开始后180秒内不能到达结束点,任务失败,比赛结束。
竞赛优胜按车模完成竞赛用时最短为优胜(含加罚时间)。
竞赛用时 = 实际计时 + 惩罚时间(X1+Y1+Z1)。
- 竞赛过程要求
1、各参赛队对车模的编程与调试只能在调试区进行,调试区可提供部分赛段供车模测试。不能在比赛场地进行调试。
2、参赛队员在检录后才能进入比赛准备区。裁判员对参赛队的车模及备品备件工具进行检查,所用器材必须符合组委会相关规定与要求。
3、参赛队员在比赛准备区,不得上网下载任何资料;不得使用手机拍摄比赛场地并上传到网上;不得与指导教师有任何形式的联系,不得携带手机进场,比赛期间禁止手机联网车模。每支参赛队仅允3名参赛队员到达比赛场地,其他队员留在准备区。
4、在两轮比赛间隔期间,参赛队可以将车模带回调试区进行维修和修改程序,下一轮比赛时,仍按原定比赛编号上场比赛。
5、竞赛过程要求
发车手(参赛队员A、B)准备
根据裁判员的口令,参赛队选出参赛队员A领取自己的车模,不得对其他参赛队的车模进行故意碰撞或损坏。参赛队员A、B在引导员指引下进入比赛场地,未在5分钟规定时间内到场的参赛队视为弃权
比赛开始
裁判员确认参赛队参赛队员A准备好后,将发出“3,2,1,开始”的倒计时口令。参赛队员A应在开始口令发出后,起动车模。
车模重新起动
车模如因车速过快冲出场地或车辆不受控制。可由参赛队员A提出重新启动;
每支参赛队单场比赛的重新起动次数不限,但有单场比赛总限时要求,且重启过程时间计入比赛时间。单场比赛最长计180秒,超时即终止该单场比赛;
重新启动指参赛队员A向裁判员提出请求,裁判员同意后,参赛队员A将车模重新放置在发车区起动。重试期间计时不停止。
车模到达指定区域
车模到达指定区域的标准:车模至少3个轮子在指定区域内(含压线)停住,视为到达指定区域。车模冲过指定区域未能及时停住,视为未能到达指定区域。
车模可以多次自主回到指定区域。
比赛结束
单场比赛总限时为180s,计时完毕后,将直接终止单场比赛,统计用时。比赛过程中,由参赛队提出不继续比赛,经裁判员确认后,停止计时,记录统计比赛用时。裁判员吹哨示意比赛结束后,参赛队员A应立即让车辆停止,将车模交回检录区,等待确认比赛积分结果。裁判员和助理裁判员将单场比赛计分统计表交给参赛队确认,参赛队应当场确认签字,如有争议应提请裁判长仲裁。参赛队员签字确认成绩后,可将车模搬回调试区进行维修或修改程序。
- 得分及排名规则
成绩排名规则
每场比赛得分采用计时,以完成任务后竞赛用时最短为优胜。
竞赛用时 = 实际计时 + 惩罚时间(X1+Y1+Z1+T1+T2)。
犯规和取消比赛资格
1、参赛队使用的车模需要粘贴裁判组发放的统一参赛号标签,参赛前要放在指定检录区进行核验。整个比赛过程中,不允许更换不同的车模参加比赛(除硬件。故障外)
2、车模按裁判员指令进行发车启动,不得抢跑。第1次误启动将受到裁判员的警告,车模回到启动区重新等待启动。第2次误启动将被取消比赛资格。
3、车模不得高速冲撞场地及各类场地设施,如发生上述失控情况,第1次将受到裁判员警告,第2次将被取消比赛资格。
4、如果有参赛队员或者其使用的车模造成比赛模型损坏,不管有意还是无意,将警告一次。该场该任务不得分,即使该任务已完成。
5、不听从裁判员的指令将被取消比赛资格。
05 技术要点及资料分发
5.1 技术要点
5.1.1 车模的运动控制设计
通过串口通讯实现核心扩展板(STM32)驱动电机、转向舵机的运动控制,参赛选手需要学习阿克曼运动模型,对本赛事使用车模即前轮舵机转向、后轮电机驱动,通过在单片机中实现运动模型控制小车运动。
基于机器人操作系统(ROS2)实现主控板(RDK X3)与核心扩展板(STM32)通信与数据收发,参赛选手需要学习使用RDK X3进行TROS.B/ROS2的开发学习,并通过ROS2实现RDK X3与单片机通信、获取单片机各传感器信息、驱动车模运动。
5.1.2 车模的AI视觉应用开发设计
车模搭载的主控核心板RDK X3具备5TOPS算力,本赛项的各个子任务将基于此高算力进行视觉开发。
二维码识别,二维码识别是日常生活中最常用到的计算机视觉技术之一。参赛选手需要通过二维码识别学习传统计算机视觉技术,并将其部署到RDK X3中,最终将二维码识别结果发布到数字环境。
引导线识别,参赛选手需要通过学习如ResNet等AI视觉算法来完成引导线识别任务。
障碍物检测,参赛选手需要通过学习如YOLO等AI视觉算法来完成障碍物检测任务。
5.1.3 数字孪生技术
此赛项将使用遥操作进行数字环境与物理环境融合,参赛选手需了解虚拟现实技术并学习使用Foxglove软件,最终需要利用Foxglove对车模进行远程运动控制。
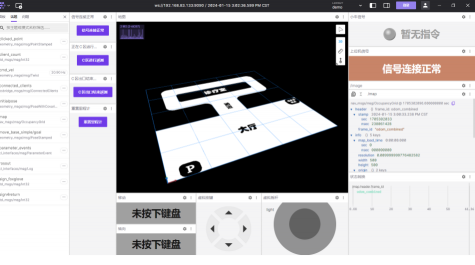
图7 Foxglove软件
5.2 资料分发
本次赛事相关培训资料、规则解读等在地平线开发者社区(https://developer.horizon.cc/)持续更新。本赛事最终解释权归组委会所有。
赛事报名、规则补充及后续通知,请关注TsinghuaJoking公众号(卓晴老师)、地平线开发者公众号、竞赛QQ群消息等。
报名咨询:
联系人:周老师 邮箱:mingzhou@ps-micro.com
竞赛QQ交流:535373387

加入2024地平线智慧医疗创意组交流群,后续培训通知、赛事报名、学习资料等都将在群内通知。
- 车模购买链接
OriginCar智能机器人套件,网络购买链接:
古月居学院(古月居学院购买,前100名享受100元代金券优惠!)(https://class.guyuehome.com/p/t_pc/goods_pc_detail/goods_detail/SPU_ENT_1704447493cct8eIV0r8888)
淘宝 (https://item.taobao.com/item.htm?id=762739997220&skuId=5255676373835&spm=a1z10.3-c-s.w4002-18201452917.11.795c7a92W5BZoz)



评论(0)
您还未登录,请登录后发表或查看评论